Cloud architects have long faced a fundamental trade-off: hardware-level security, extremely fast cold starts, and broad application compatibility. Choose any two.
The Cloud Native Computing Foundation’s (CNCF) Hyperlight project delivers faster, more secure, and smaller workload execution to the cloud-native ecosystem—achieving hardware isolation with extremely fast cold starts by eliminating the operating system entirely. The challenge: without system calls, applications must be specially written for Hyperlight’s bare-metal environment.
Hyperlight and the Nanvix microkernel project have now combined efforts to solve this final constraint. By adding a POSIX compatibility layer, the integration enables Python, JavaScript, C, C++, and Rust applications to run with full hardware isolation and extremely rapid cold starts—much closer to meeting all three requirements.
This post explains the serverless trilemma and walks through how we attempt to break through it.
The serverless trilemma: pick two?
When building serverless infrastructure, architects have traditionally faced a painful trade-off. You can have any two of the following, but not all three:
- Fast Cold Start—containers and WebAssembly sandboxes prioritize startup speed over security isolation. They rely on software protection boundaries (seccomp, namespace isolation, WebAssembly imports/exports) rather than hardware boundaries. These software boundaries can be bypassed if vulnerabilities exist in the kernel or runtime, whereas hardware boundaries are immutable and enforced by the processor itself.
- Secure Isolation—traditional virtual machines (VMs) provide battle-tested hypervisor isolation, but they require booting an entire operating system (OS), leading to cold starts measured in hundreds of milliseconds.
- Runtime Compatibility—running existing applications typically requires a full POSIX environment with system calls, file systems, and standard libraries—something that bare-metal micro-VMs don’t provide.
With Hyperlight, we showed that it’s possible to create micro-VMs in low tens of milliseconds by eliminating the OS and virtual devices. But this speed came at a cost: Hyperlight guests have no system calls available. Instead, they’re statically linked binaries that communicate only through explicit host-guest function calls. That’s secure and fast, but it limits what applications you can run.
Nanvix: an OS for cloud-native apps
Nanvix is a Rust-based microkernel created by the Systems Research Group at Microsoft Research. Unlike traditional OSes, Nanvix was co-designed with Hyperlight from the ground up. It’s not a general-purpose OS—it’s a minimal OS tailored specifically for ephemeral serverless workloads. Here are some highlights of Nanvix:
- Microkernel Design Philosophy—Nanvix implements only the essential kernel services needed for serverless functions. Everything else runs in user space or is handled by the host.
- POSIX Compatibility—Nanvix provides over 150 POSIX system calls, enabling support for Python, JavaScript, WASI, Rust, and C/C++ applications without code changes.
- Cloud-Optimized Services—OS services are tailored specifically for ephemeral serverless workloads, not long-running processes.
- Memory Safety—written in Rust.
The result? You can now run real applications—with file systems, system calls, and language runtimes—inside a Hyperlight micro-VM, while maintaining hypervisor-grade isolation and achieving double-digit-millisecond cold starts.
Toward breaking the trilemma: Hyperlight and Nanvix
The combination of Hyperlight and Nanvix addresses the trilemma by splitting responsibilities. Hyperlight controls everything the guest VM can do on behalf of the trusted host, providing hardware-enforced isolation. Nanvix’s optimized microkernel runs inside the Hyperlight guest, providing the POSIX system calls and file system int erface that applications expect. Together, they enable hardware-isolated execution of Python, JavaScript, C, C++, and Rust applications with double-digit millisecond-order cold starts.
How it works: the split OS design
The magic of Hyperlight-Nanvix lies in its split OS design. Rather than running a monolithic OS inside the VM, it splits responsibilities between two groups of components:
- Ephemeral components (run inside the Hyperlight VM)—These are the components that require hardware isolation: the application code, language runtime, POSIX compatibility layer, and the Nanvix kernel itself. Everything executing untrusted or tenant-specific code runs inside the VM boundary.
- Persistent components (on the Host)—I/O, networking, and shared state are managed by the host system. The Hyperlight VMM mediates all communication between the guest and these services.
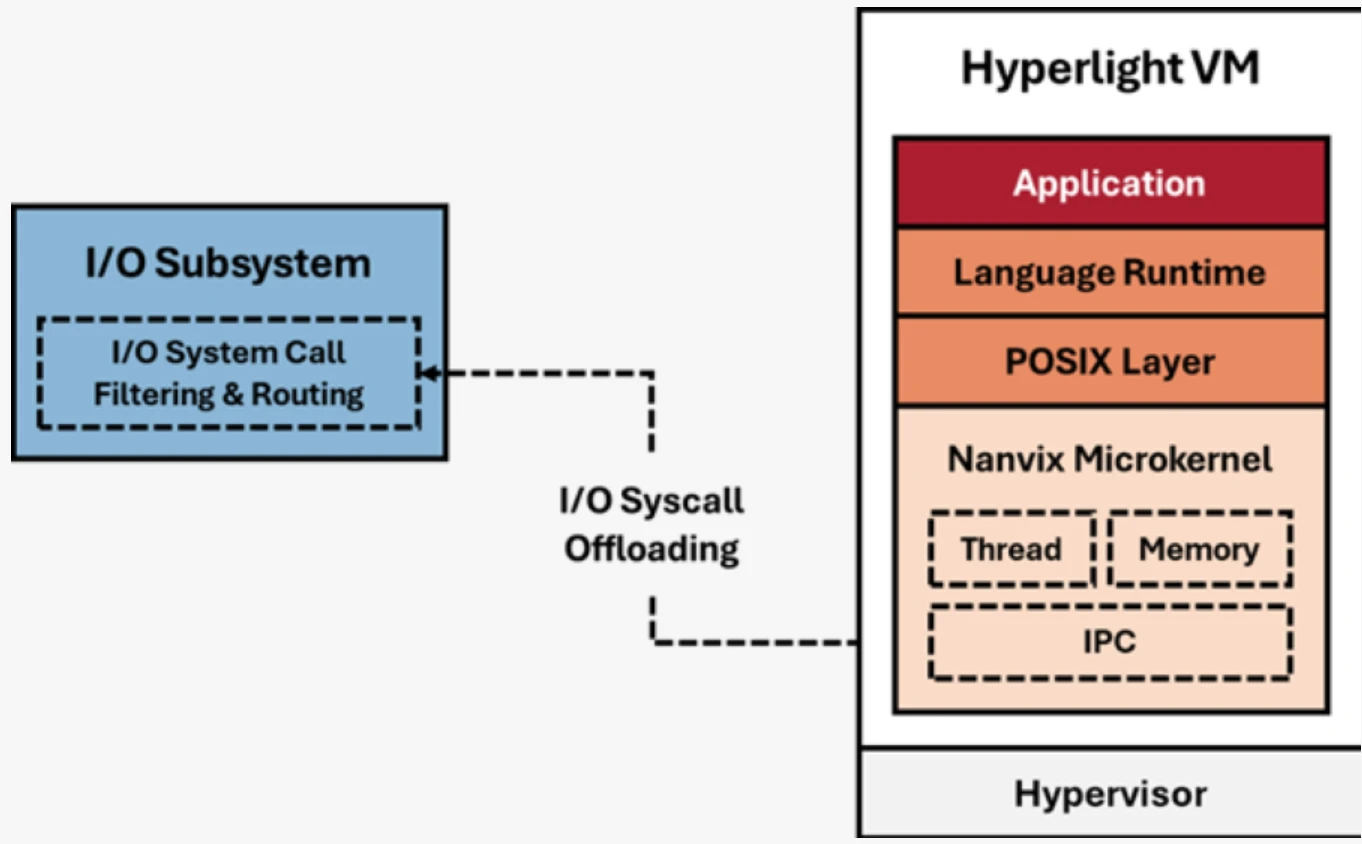
This split architecture means we get the best of both worlds. Applications see a familiar POSIX environment, but the actual I/O operations are handled by the host—enabling high density, fast cold starts, and shared state across invocations when needed.
System call interposition: security at the system call boundary
One of the most powerful features of the Hyperlight-Nanvix integration is system call interposition. When a guest application makes a system call (like openat to open a file), the request flows through Nanvix, across the VM boundary via Hyperlight’s VM exit mechanism, and to the host. At this boundary, the host can:
- Accept—allow the system call to proceed
- Intercept—transform system call arguments or return values
- Block—deny specific system calls entirely based on security policy
This gives you fine-grained control over what untrusted code can do, even when that code expects a full OS underneath it. Want to allow file reads but block network access? You can enforce that at the system call level without modifying the guest application.
Deployment modes: flexibility for different threat models
Hyperlight-Nanvix delivers all three requirements—hardware isolation, fast cold starts, and application compatibility. But different use cases have different security requirements. The integration supports three deployment architectures that let you optimize for your specific threat model.
Across all three modes, the Hyperlight VM remains identical. What changes is how the I/O subsystem is deployed: whether it runs in the same process as the VMM, in a separate process, or in a separate VM entirely. Each architecture offers different trade-offs between isolation strength, performance, and resource density.
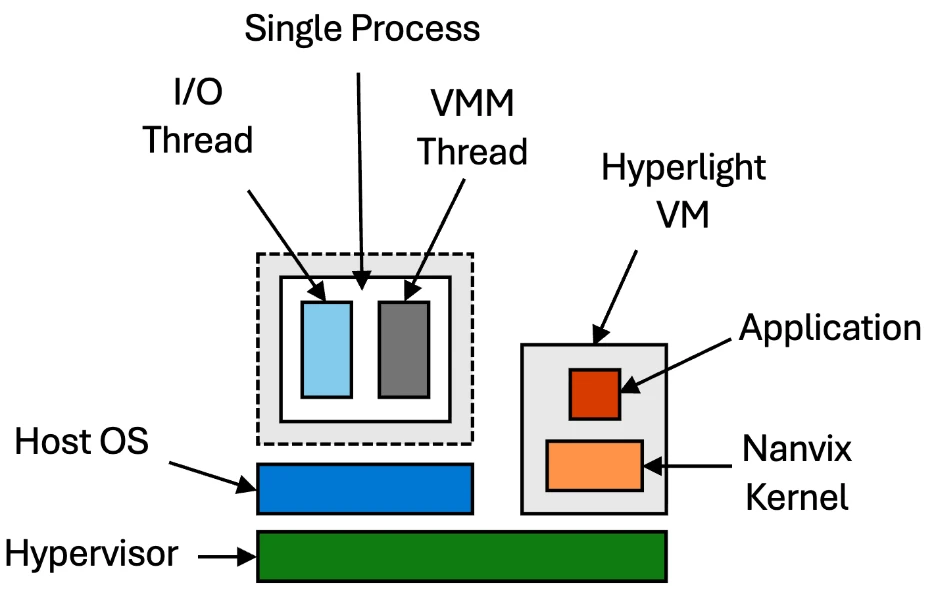
Single process architecture
The simplest deployment model runs the I/O subsystem and the Hyperlight VMM in a single host process. The VMM thread manages the Hyperlight VM, while an I/O thread handles system call interposition. This provides the same threat model as Hyperlight without Nanvix—fast and simple, ideal for running small, untrusted workloads with hardware isolation.
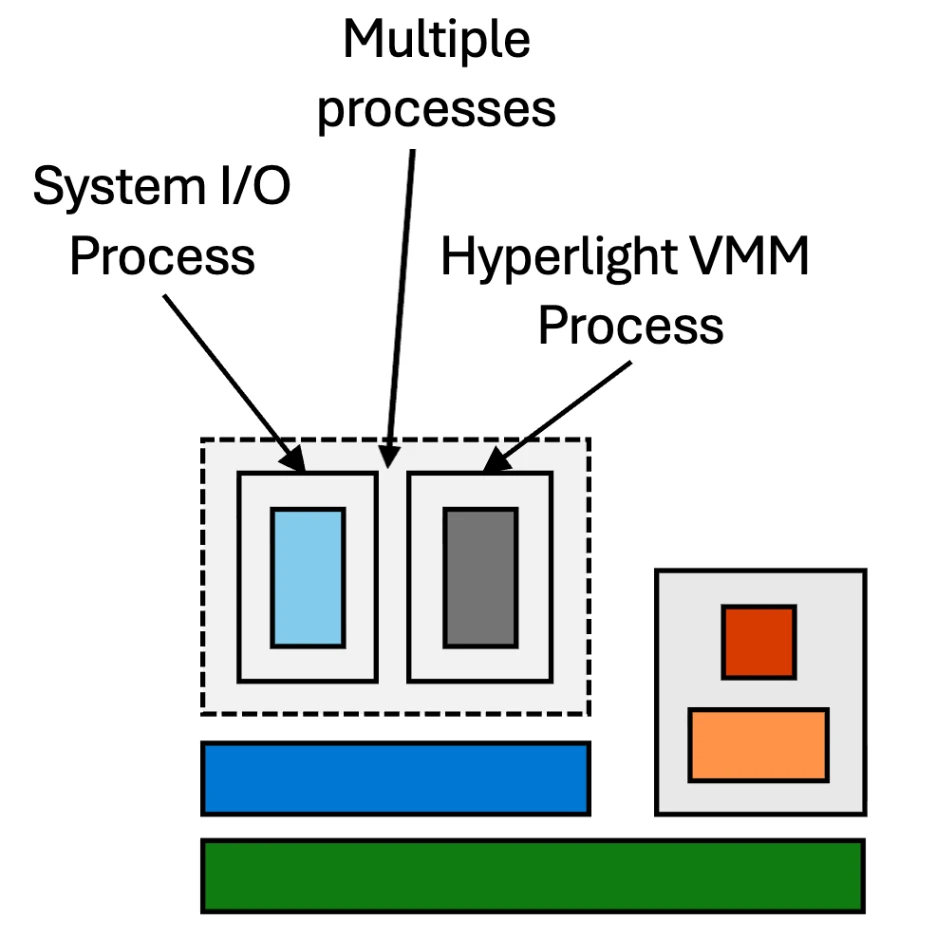
Multi-process architecture
For improved isolation, you can separate the VMM and I/O handling into different host processes. The VMM process manages the Hyperlight VM, while a separate system process handles I/O operations. This constrains the blast radius if a vulnerability is exploited—an attacker who escapes the VM still can’t access I/O resources directly. The system I/O process can also be shared across multiple concurrent instances for the same tenant, improving both density and deployment time.
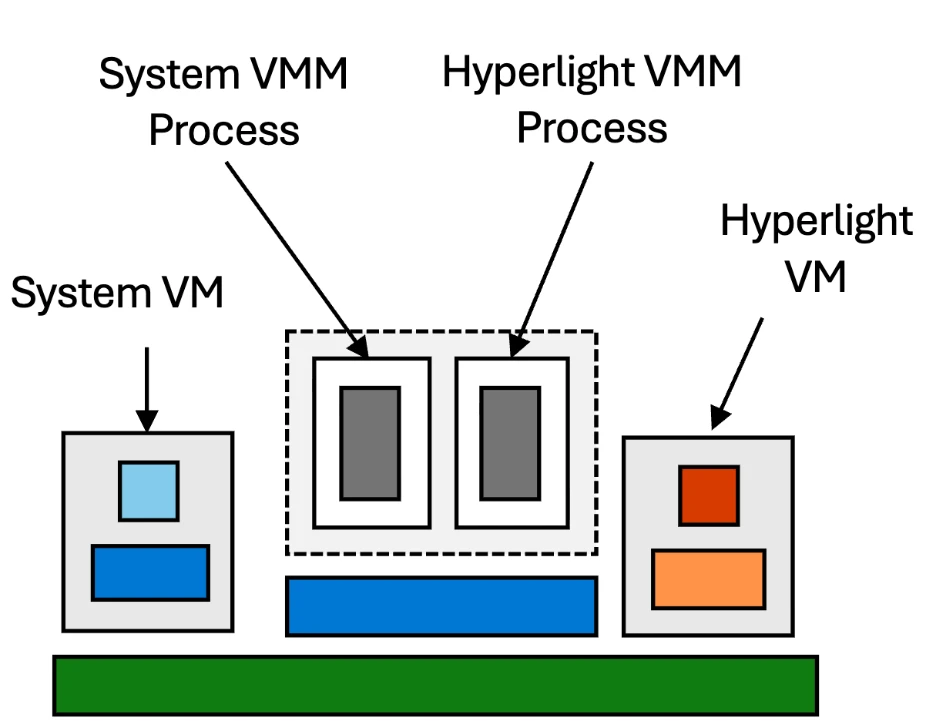
Disaggregated architecture
The most isolated deployment runs two separate VMs on the host hypervisor (using Hyper-V or KVM). The System VM handles all I/O system calls and can serve as a shared backend for multiple Hyperlight VMs. The Hyperlight VM forwards I/O requests across the hypervisor boundary to the System VM, providing defense-in-depth with multiple hypervisor boundaries.
Performance: fast cold starts with real applications
We’ve tested Hyperlight-Nanvix against other isolation technologies using real-world applications. Our early benchmarks show very promising results:
- Double-digit millisecond-order cold starts when booting the Nanvix kernel, loading a language runtime, and executing application code
- Significantly faster than traditional VM solutions for the same deployment model
- High memory efficiency with hundreds of instances per GiB of memory
- Fast enough for per-request VM isolation without sacrificing security
How far did we get to breaking the trilemma? We’re preparing a detailed benchmark analysis that we’ll share in a follow-up post, including methodology, reproducible test cases, and comparative data across different workloads. This will give you the data and tests you need to decide for yourself.
Language support: from C to Python
Because Hyperlight-Nanvix provides a POSIX compatibility layer, you can run applications in virtually any language, among them:
- C and C++—compiled directly against the Nanvix toolchain
- JavaScript—using QuickJS or other embedded JS engines
- Python—with an embedded Python interpreter
- Rust—native support with the Hyperlight guest library
The key insight is that language runtimes themselves are just applications. By providing system calls and a file system, Nanvix enables you to embed interpreters like QuickJS or CPython inside the micro-VM. Your JavaScript or Python code runs normally—it has no idea it’s executing inside a hardware-isolated sandbox.
This approach also explains why Hyperlight-Nanvix achieves better performance than general-purpose operating systems: Nanvix is optimized for workloads you want to spin up, execute, and tear down as quickly as possible—the exact pattern cloud-native serverless functions demand.
Use case: running AI-generated code safely
One compelling use case for Hyperlight-Nanvix is executing AI-generated code. As large language models become more capable of writing code, we need secure environments to run that code without risking our infrastructure.
AI-generated code should be treated as untrusted and potentially malicious. With Hyperlight-Nanvix, you can:
- Spin up an isolated micro-VM in tens of milliseconds
- Execute the generated code with strong language support
- Interpose on system calls to enforce security policies (no network, limited file access)
- Destroy the VM after execution, leaving no persistent state
The hypervisor boundary means that even if the generated code contains an exploit targeting the language runtime, the attacker still faces a hardware-enforced wall. And because cold starts are so fast, you can afford to create a fresh VM for every code execution—no need to reuse potentially compromised sandboxes.
Getting started
The hyperlight-nanvix wrapper provides out-of-the-box support for running JavaScript, Python, C, and C++ programs inside Nanvix guests.
git clone https://github.com/hyperlight-dev/hyperlight-nanvix
cd hyperlight-nanvix
# Download the Nanvix toolchain and runtime
cargo run -- --setup-registry
# Run scripts directly
cargo run -- guest-examples/hello.js # JavaScript
cargo run -- guest-examples/hello.py # Python
For C and C++ programs, you’ll need to compile them first using the Nanvix toolchain (via Docker). See the repository README for compilation instructions.
Example: running workloads from Rust
use hyperlight_nanvix::{Sandbox, RuntimeConfig};
#[tokio::main]
async fn main() -> anyhow::Result<()> {
let config = RuntimeConfig::new()
.with_log_directory("/tmp/hyperlight-nanvix")
.with_tmp_directory("/tmp/hyperlight-nanvix");
let mut sandbox = Sandbox::new(config)?;
// Works with any supported file type
sandbox.run("guest-examples/hello.js").await?;
sandbox.run("guest-examples/hello.py").await?;
sandbox.run("guest-examples/hello-c").await?;
Ok(())
}
Example: system call interposition
use hyperlight_nanvix::{Sandbox, RuntimeConfig, SyscallTable, SyscallAction};
unsafe fn custom_openat(
_state: &(),
dirfd: i32,
pathname: *const i8,
flags: i32,
mode: u32,
) -> i32 {
println!("Intercepted openat call - auditing file access");
// Forward to actual system call or block based on policy
libc::openat(dirfd, pathname, flags, mode)
}
#[tokio::main]
async fn main() -> anyhow::Result<()> {
let mut system_call_table = SyscallTable::new(());
system_call_table.openat = SyscallAction::Forward(custom_openat);
let config = RuntimeConfig::new()
.with_system_call_table(Arc::new(system_call_table));
let mut sandbox = Sandbox::new(config)?;
sandbox.run("guest-examples/hello-c").await?;
Ok(())
}
The repository also includes a Node.js/NAPI binding, allowing you to create sandboxes directly from JavaScript. Check out examples/ai-generated-scripts/ for a complete example of safely executing AI-generated code. This example requires additional setup—see the README in that directory.
Get involved with Hyperlight and Nanvix
Hyperlight is a CNCF Sandbox project, and we’re excited to see the community build on this foundation. The integration with Nanvix represents the next step in our vision: making hardware-isolated serverless execution practical for real-world applications.
- Explore Hyperlight-Nanvix Integration GitHub
- Join the community and bi-weekly meetings
- (Wednesday at 9 AM PST/PDT)
- CNCF Slack: #hyperlight channel
- Learn more about Hyperlight GitHub
- Learn more about Nanvix GitHub